1
/
of
2
MAJESTRONICZ
3 DOF (Degrees of Freedom) Robotic Arm
3 DOF (Degrees of Freedom) Robotic Arm
Regular price
Rs. 369.00
Regular price
Rs. 450.00
Sale price
Rs. 369.00
Unit price
/
per
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
📦 For Bulk Order Enquiry – Click Here for Best Price
3 DOF (Degrees of Freedom) Robotic Arm
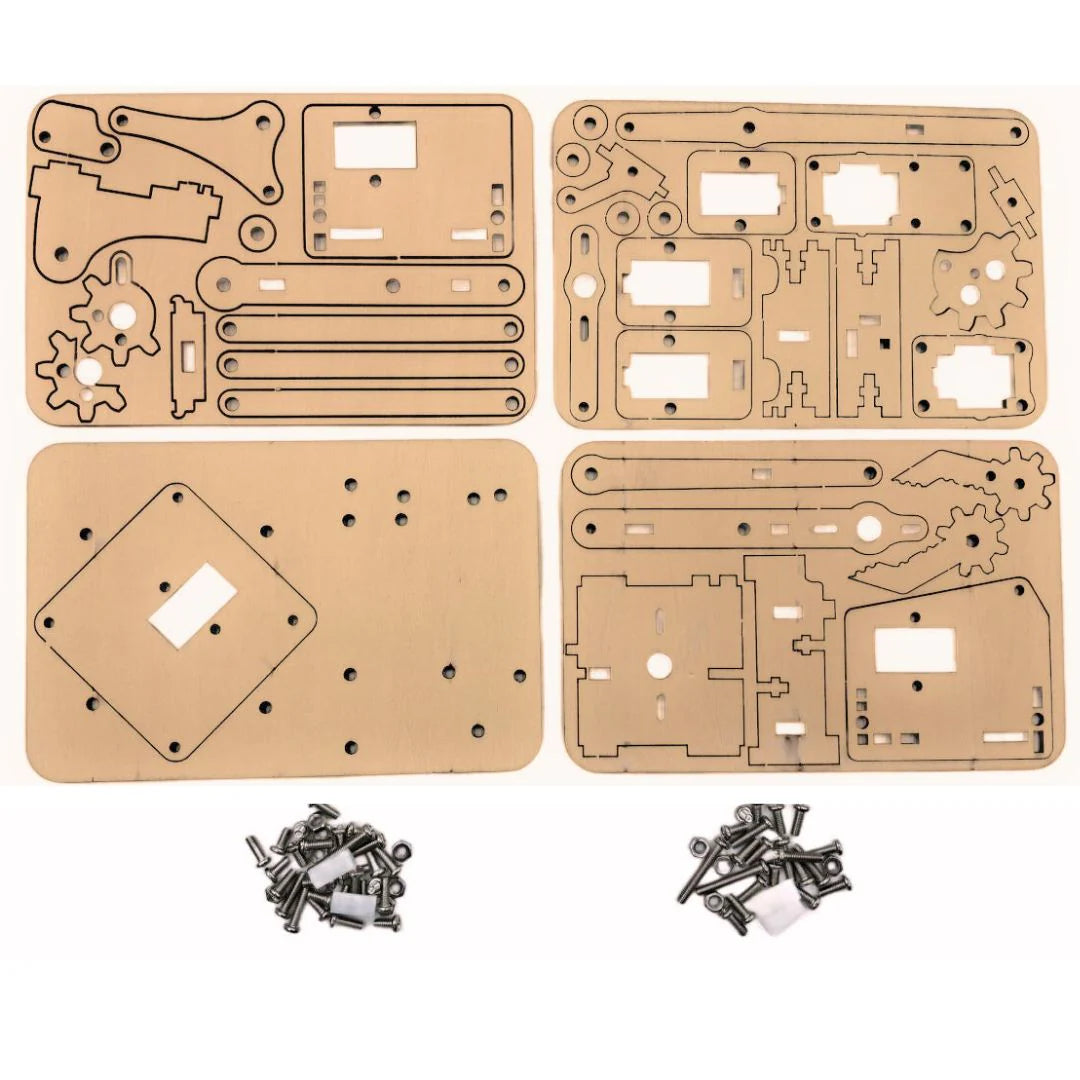
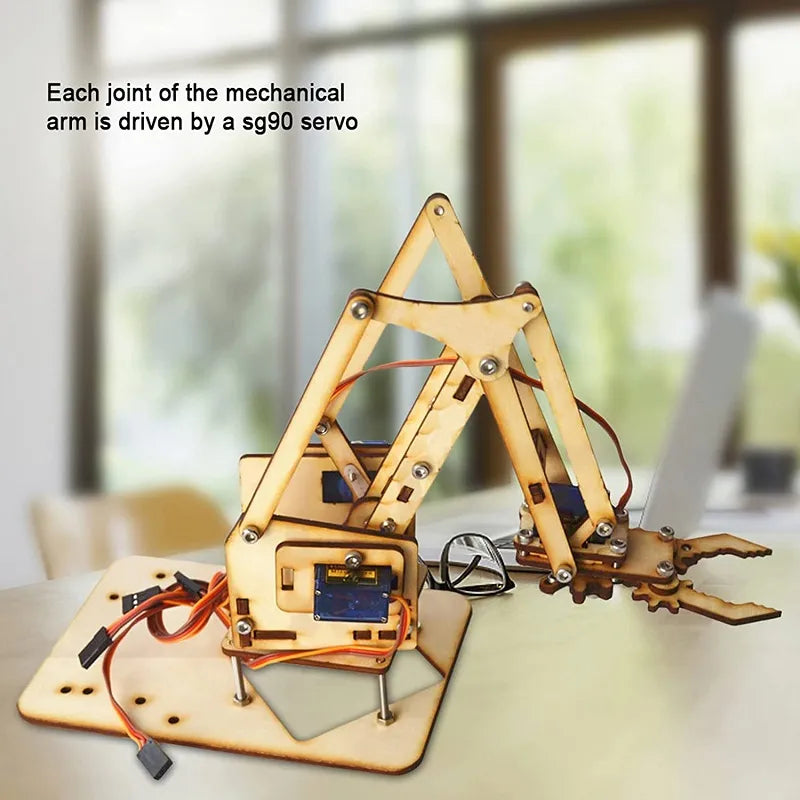
The 3 DOF (Degrees of Freedom) robotic arm is a mechanical structure kit used for building basic robotic arm systems. It provides multiple joint movements for learning, prototyping, and automation experiments in robotics and embedded systems.
- Degrees of Freedom: 3-axis movement
- Material: wooden mechanical structure (kit dependent)
- Assembly type: DIY mechanical kit
- Mounting: Pre-cut holes for standard motor and servo mounting
- Application: Robotics learning, automation projects, educational use
- Compatibility: Suitable for standard hobby servos and DC motor setups
Share